平台热线
平台热线



MotoSimEG-VRC安川机器人虚拟调试 第四节 摆焊
版权归原作者所有,如有侵权,请与我联系删除
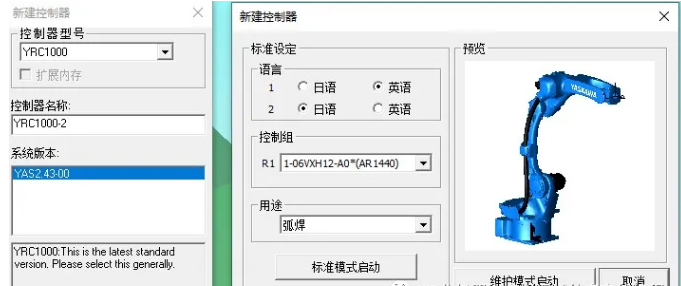
1、新建弧焊机器人系统,选择所需的机器人型号(本例中选择AR1440),完成后放置到合适的位置;
2、从模型库中插入焊***模型(安装到机器人T轴法兰),也可自己导入模型,支持多种格式(一般以hsf格式导入);
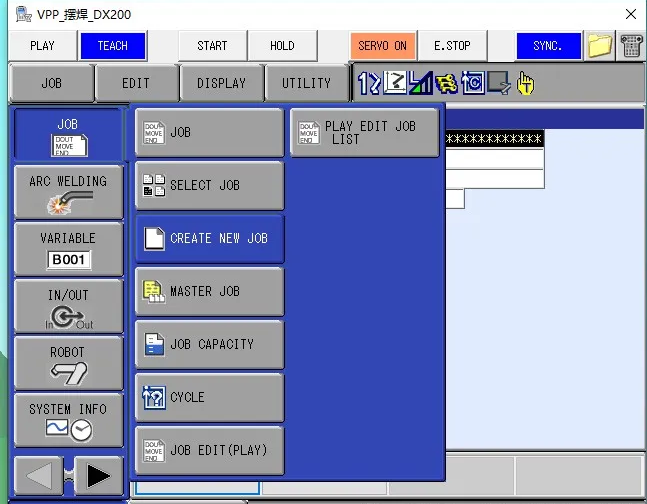
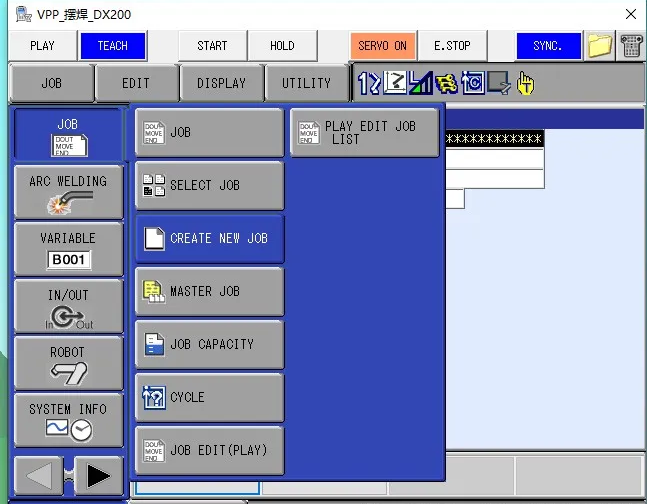
3、新建机器人程式;
4、设置摆焊类型(三种形式:单一、三角、L),和焊接参数,如下图;
5、编写机器人程式,添加焊接指令(本例中添加了三种摆焊形式);
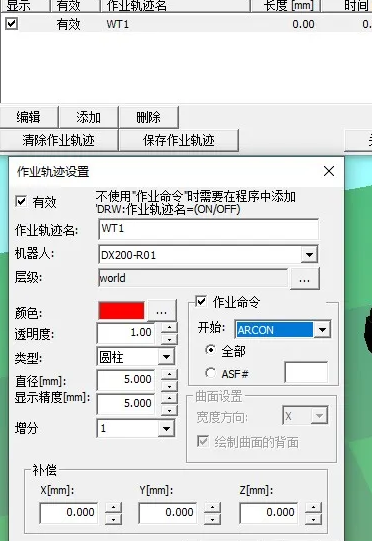
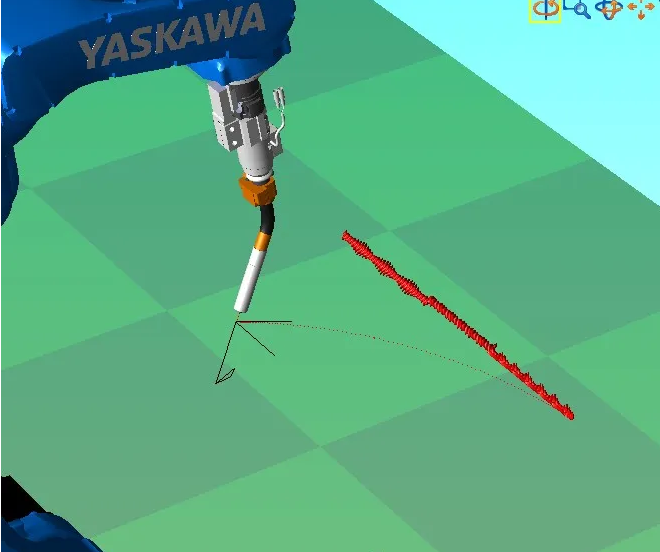
6、焊接轨迹设置,可以设置焊接轨迹的形状、颜色、透明度、大小等,显示焊接轨迹后可以很直观的看到摆焊的样式,后续图中显示了三种样式的轨迹(轨迹显示是否***细腻和设置的参数有关);
7、试运行程序,完成
了解更多安川机器人咨询请点击:安川机器人
声明:本媒体部分图片、文章来源于网络,