平台热线
平台热线



MotoSimEG-VRC安川机器人虚拟调试 |三轴变位机仿真
声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除
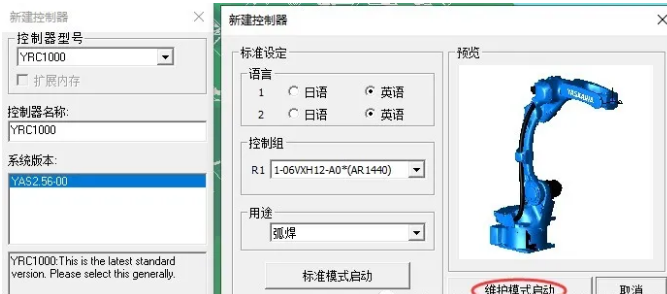
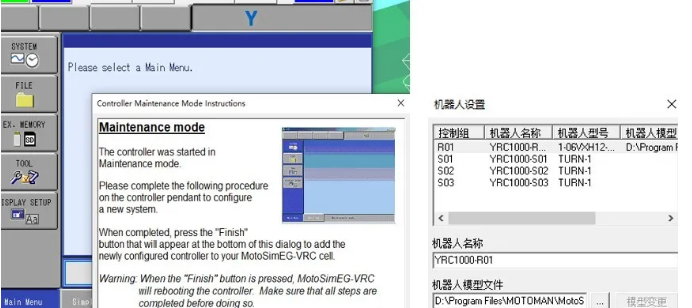
1、这一节我们主要讲述不带协调功能的外部轴仿真,下面以三轴变位机为例,打开上一节新建的项目,因为机器人底座、变位机模型已经导入,我们这里直接新建弧焊机器人,选择维护模式启动(当然这里也可以选择标准模式启动,机器人创建完成后再进入维护模式进行下一步操作),如下图:
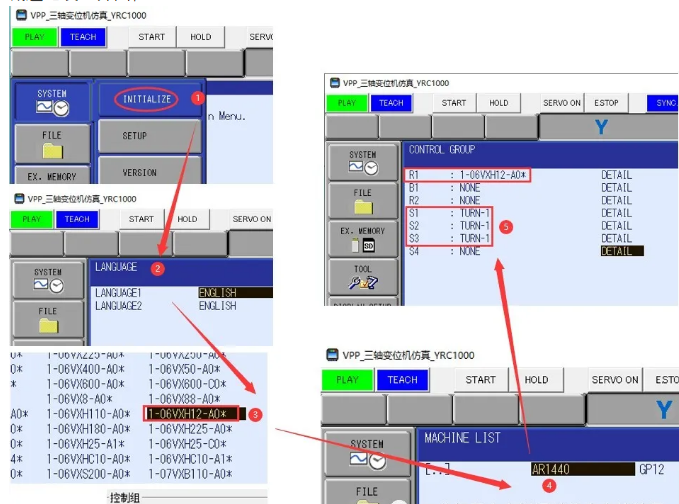
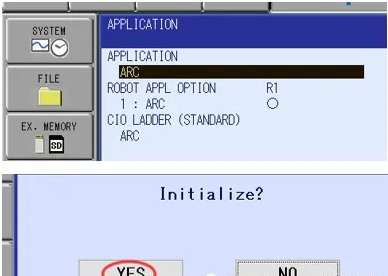
2、进入维护模式后,(按空格键进行选择、按Enter键下一步、按Esc返回上一步)选择系统—初始化—语言改为英文—选择1-06VXH12-A0*(AR1440)—添加三个外部轴TURN-1(S1大翻转、S2、S3小翻转),按Enter键下一步,直到外部轴正负极限、减速比设置界面;
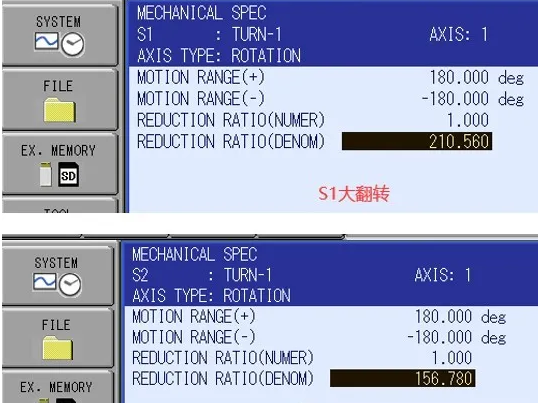
3、如下图设置外部轴正负极限和减速比,Enter;
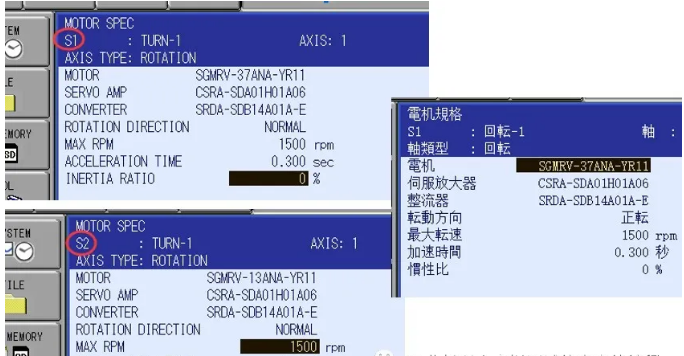
4、选择电机、伺服放大器、整流器的规格型号,设置***大转速,Enter;
5、直接默认弧焊,Enter进入下一步,直到弹出对话框选择YES;
6、如下图所示对话框,点击下一步直到完成,机器人设置对话框点击确定,另存为三轴变位机仿真项目;
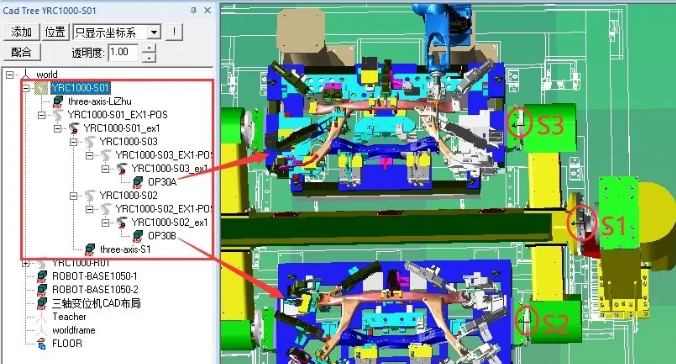
7、先将S1、S2、S3外部轴坐标调整到变位机的3个旋转轴中心位置,注意坐标带箭头的方向为回转轴线,完成后再将夹具、变位机框架移动到如下图模型树所示的各层级下面:变位机框架、S2、S3移动到S1下面;OP30B移动到S2下面;OP30A移动到S3下面,完成后可以转动外部轴查看效果;
8、将R1放置到机器人底座上面,从模型库安装一把焊钳到机器人T轴法兰,完成以上步骤后机器人就可以对每一个外部轴进行单独控制,若想同时控制多个轴组,需要进入安川模式,开启FD090参数(改为1);
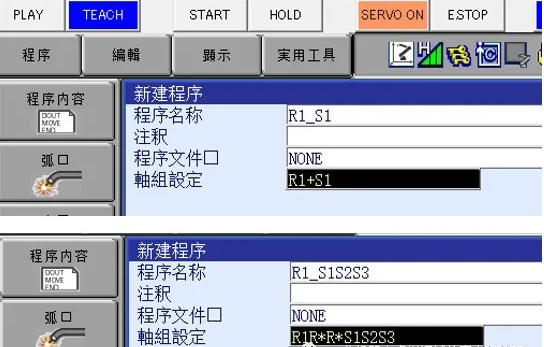
9、FD参数修改完成后重启示教器,进入设置新建轴组,如下图;
10、新建机器人程序,选择不同的轴组控制不同的外部轴;
11、打开R1_S1S2S3程序,示教两个点来查看效果,保存、退出。下一节讲解机器人和外部轴协调功能的设定。
了解更多安川机器人咨询请点击:安川机器人